Integrasi ESP32-CAM dengan AI Detection
Membangun sistem IoT untuk deteksi objek real-time menggunakan ESP32-CAM, YOLOv5, dan Flask. Dari hardware hingga deployment.
Integrasi ESP32-CAM dengan AI Detection
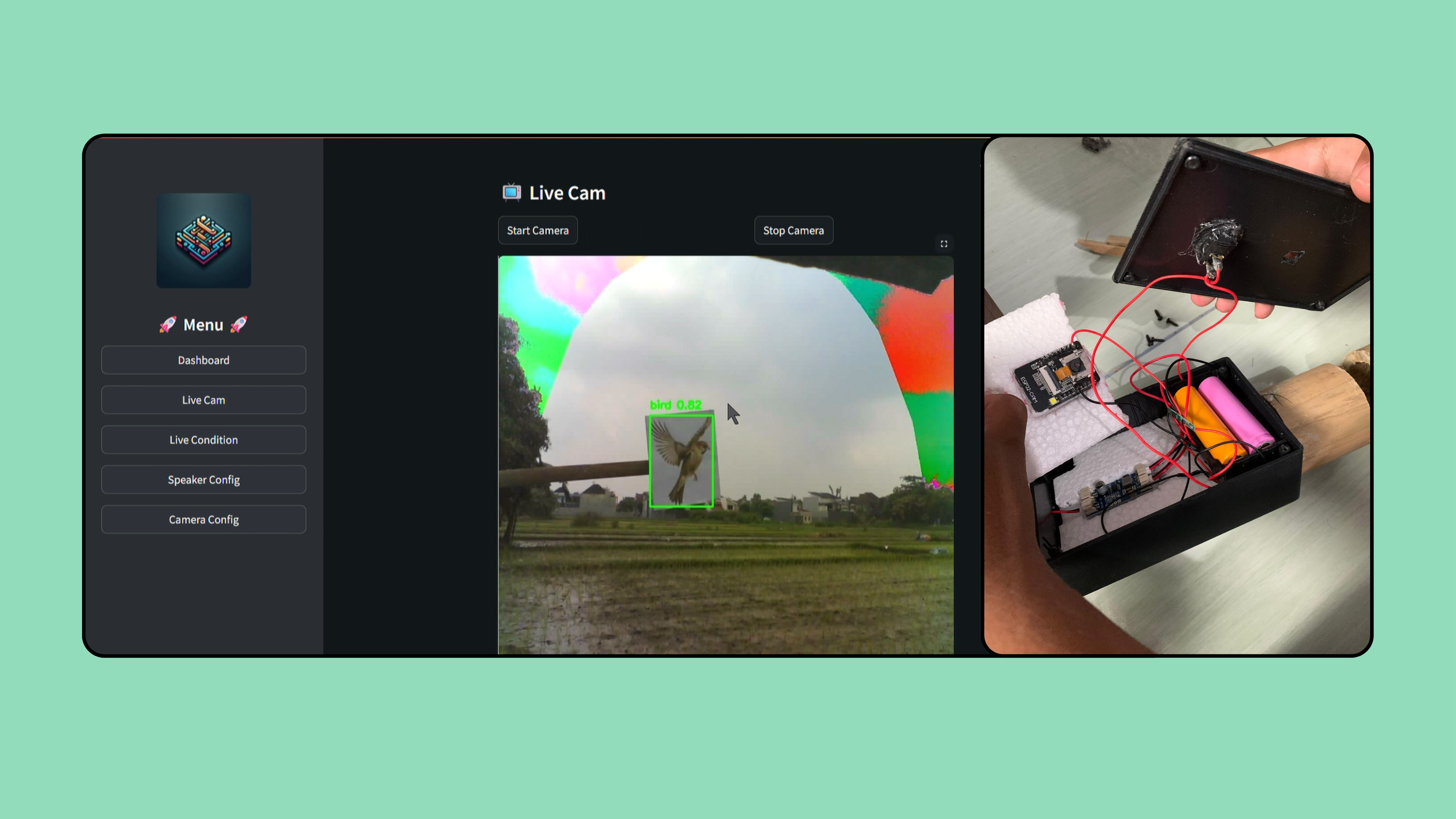
Dalam project AI Bird Detector, saya membangun sistem IoT yang bisa mendeteksi burung secara real-time dan mengaktifkan speaker pengusir. Artikel ini menjelaskan keputusan arsitektur dan lessons learned.
The Problem
Petani kehilangan hingga 30% hasil panen karena burung yang memakan padi. Solusi manual seperti orang-orangan sawah tidak efektif dan membutuhkan pengawasan terus-menerus.
Architecture Overview
┌─────────────┐ ┌─────────────┐ ┌─────────────┐
│ ESP32-CAM │───▶│ Flask API │───▶│ YOLOv5 │
│ (Solar) │ │ Server │ │ Detection │
└─────────────┘ └─────────────┘ └─────────────┘
│ │ │
│ ▼ ▼
│ ┌─────────────┐ ┌─────────────┐
└────────▶│ Streamlit │ │ Speaker │
│ Dashboard │ │ Trigger │
└─────────────┘ └─────────────┘Key Architecture Decisions
1. ESP32-CAM vs Raspberry Pi
| Aspect | ESP32-CAM | Raspberry Pi |
|---|---|---|
| Cost | ~$10 | ~$50+ |
| Power | ~0.5W | ~3-5W |
| Processing | Limited | Full Linux |
Decision: Pilih ESP32-CAM karena:
- Cost efficiency untuk multiple deployment
- Lower power consumption → viable untuk solar panel
- Processing bisa di-offload ke server
⚖️ Trade-off: Limited onboard processing, tapi acceptable karena server tersedia.
2. Edge vs Cloud Inference
Option A: Edge (On-device)
- Pro: Low latency, offline capable
- Con: ESP32 tidak cukup memory untuk YOLO
Option B: Cloud Inference
- Pro: Can use full YOLO model
- Con: Depends on network
Decision: Cloud inference dengan fallback behavior. Jika network down, speaker tetap aktif secara periodik.
3. YOLOv5 Model Selection
Tested beberapa variants:
YOLOv5n: 1.9M params, 45fps, 28.0 mAP
YOLOv5s: 7.2M params, 35fps, 37.4 mAP ← Selected
YOLOv5m: 21.2M params, 20fps, 45.4 mAPDecision: YOLOv5s — balance antara accuracy dan speed untuk real-time detection.
ESP32-CAM Code
#include <WiFi.h>
#include <esp_camera.h>
#include <HTTPClient.h>
// Camera pins for AI-Thinker model
#define PWDN_GPIO_NUM 32
#define RESET_GPIO_NUM -1
#define XCLK_GPIO_NUM 0
#define SIOD_GPIO_NUM 26
#define SIOC_GPIO_NUM 27
void setup() {
Serial.begin(115200);
// Initialize camera
camera_config_t config;
config.ledc_channel = LEDC_CHANNEL_0;
config.pixel_format = PIXFORMAT_JPEG;
config.frame_size = FRAMESIZE_VGA; // 640x480
config.jpeg_quality = 12;
config.fb_count = 1;
esp_err_t err = esp_camera_init(&config);
if (err != ESP_OK) {
Serial.printf("Camera init failed: 0x%x", err);
return;
}
connectWiFi();
}
void loop() {
camera_fb_t *fb = esp_camera_fb_get();
if (!fb) {
Serial.println("Camera capture failed");
return;
}
// Send to detection server
sendToServer(fb->buf, fb->len);
esp_camera_fb_return(fb);
delay(2000); // 2 second interval
}
void sendToServer(uint8_t *data, size_t len) {
HTTPClient http;
http.begin("http://server-ip:5000/detect");
http.addHeader("Content-Type", "image/jpeg");
int httpCode = http.POST(data, len);
if (httpCode == 200) {
String response = http.getString();
if (response.indexOf("bird") != -1) {
triggerSpeaker();
}
}
http.end();
}
void triggerSpeaker() {
// GPIO untuk relay speaker
digitalWrite(SPEAKER_PIN, HIGH);
delay(5000);
digitalWrite(SPEAKER_PIN, LOW);
}Flask Detection Server
from flask import Flask, request, jsonify
import torch
from PIL import Image
import io
app = Flask(__name__)
# Load YOLOv5 model
model = torch.hub.load('ultralytics/yolov5', 'custom',
path='bird_detector.pt')
model.conf = 0.5 # Confidence threshold
@app.route('/detect', methods=['POST'])
def detect():
if 'image/jpeg' not in request.content_type:
return jsonify({'error': 'Invalid content type'}), 400
# Read image from request
img = Image.open(io.BytesIO(request.data))
# Run detection
results = model(img)
# Parse results
detections = []
for *xyxy, conf, cls in results.xyxy[0]:
detections.append({
'class': model.names[int(cls)],
'confidence': float(conf),
'bbox': [float(x) for x in xyxy]
})
# Log for monitoring
bird_count = sum(1 for d in detections if d['class'] == 'bird')
if bird_count > 0:
print(f"🐦 Detected {bird_count} birds!")
return jsonify({
'detections': detections,
'bird_detected': bird_count > 0
})
if __name__ == '__main__':
app.run(host='0.0.0.0', port=5000)Lessons Learned
Setelah 6 bulan development dan field testing:
1. Power Consumption is Critical
Solar panel 10W + battery 18650 cukup untuk operasi 12 jam. Tapi:
- Deep sleep mode wajib saat malam
- Reduce capture frequency saat battery low
2. Field Testing != Lab Testing
Di lab: 95% accuracy Di sawah: 85% accuracy
Penyebab:
- Lighting conditions berbeda
- Bird species lokal berbeda dari training data
- Weather (rain, fog) affect camera
3. Simple Trigger Logic Wins
Awalnya saya buat logic kompleks:
if bird_detected AND confidence > 0.7 AND not recently_triggeredTernyata simple logic lebih reliable:
if bird_detected: trigger_speaker()💡 “Simple architecture that works > complex architecture that might fail”
Result
Setelah deployment di 3 lokasi:
- Speaker activation rate: ~15x/hari
- Farmer feedback: “Lebih efektif dari orang-orangan sawah”
- System uptime: 97%
Kesimpulan
Membangun IoT + AI system membutuhkan banyak trade-off antara cost, power, accuracy, dan reliability. Key takeaways:
- Start simple — complexity bisa ditambahkan later
- Test in real conditions — lab ≠ field
- Monitor everything — logging saves debugging time
- Design for failure — network down, battery low, camera fail
Feel free to reach out kalau ada pertanyaan tentang IoT atau AI integration!